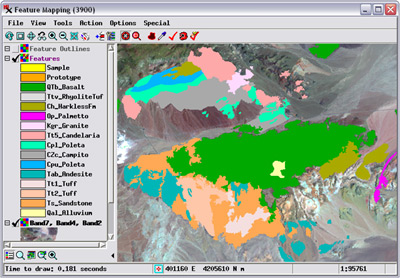
Feature Mapping is an interactive classification process that can be applied to any aerial or satellite multiband imagery, from high-quality hyperspectral to poor-quality airvideo. Using Feature Mapping's interactive tools, you can analyze any number of bands to identify, mark, and measure feature classes. You guide the classification procedure by designating a sample area for a prospective class on a reference image, then let Feature Mapping tools find similar image cells throughout the image or in a contiguous patch around the sample. You can classify as much of the image as you like, including marking training areas for use in the Automatic Classification process.
See also:
Tech Guides on Feature Mapping and
tutorials on Feature Mapping and
Image Classification

Prototype feature (red) marked using automatic hole-filling (green)
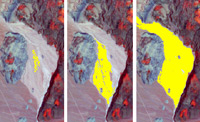
Grow prototype feature

View features as outlines
Feature Mapping Highlights
- Analyze any number of image bands
- Classify the image one feature class at a time
- Identify sample cells for feature class using point and/or polygon tool
- Generate class prototypes by exact match to sample cells or by ranges defined by samples
- Automatically generate prototype class features over entire image, then decide which cell clusters to mark (assign to the class)
- Mark individual features, multiple features selected by polygon, or Mark All
- Apply optional hole filling when marking features
- Grow individual feature prototype as cluster of contiguous cells with control over size
- Protect areas from being classified/misclassified by automated classification tools
- Draw polygons to manually define prototypes and features
- Draw polygons to change class assignments for desired areas
- View feature overlay as solid fills or unfilled outlines
- Save feature set as vector object or KML file
- Automatically transfer styles for feature classes to vector polygons
- Define region-of-interest for classification purposes
- Generate report with statistics for all marked features
- Automatic prompting to save any unsaved objects on exit
- Classify imagery unsuitable for automatic classification
- Optionally view sample cell ranges with values of pixel under cursor outside current range highlighted
- Use multiple views for reference