Terranean Mapping Technologies (now a part of RPS Group Australia) operates a LIDAR system and uses TNTmips in combination with specialized software to process their LIDAR data. They have made available a series of scripts they have developed using the TNT Geospatial Scripting Language (SML) to carry out LIDAR processing in TNTmips. They use these scripts to create, filter, and refine surfaces from LAS files, to classify the LIDAR points, and to extract additional information from the LIDAR point clouds.
The LIDAR system operated by Terranean and RPS Group is flown at low altitude and low speed, producing a high spatial density of LIDAR points that can include returns from the ground, hard surfaces above ground, and multiple returns from vegetation. This dense data can be readily converted to raster surfaces because the low-altitude LIDAR system typically generates up to 13 pulses per square meter, producing multiple point returns per raster cell for a DEM with 1-meter cell size. Surface rasters are generated from both minimum and maximum LIDAR point elevations. These surfaces are filtered and processed using SML scripts to produce a bare-ground DEM, which is then used to classify the LIDAR points into ground and non-ground categories. (Note that the Lidar Classification process in TNTmips provides ground classification options for more typical sparser point clouds acquired at higher altitude and flying speed.)
![]() TNTmips LiDAR to DEM workflow
This document outlines how the scripts below are used in sequence to process high-density LIDAR point data into ground and above-ground categories.
TNTmips LiDAR to DEM workflow
This document outlines how the scripts below are used in sequence to process high-density LIDAR point data into ground and above-ground categories.
![]() Lidar with TNTmips
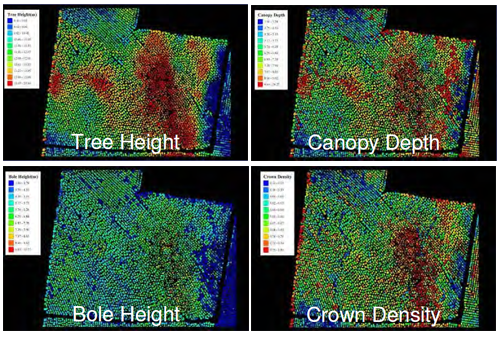
This document describes some further analysis that Terannean Mapping
carried out using classified point data from a pine plantation, delineating tree crowns and measuring tree height, canopy density, and canopy depth.
Lidar with TNTmips
This document describes some further analysis that Terannean Mapping
carried out using classified point data from a pine plantation, delineating tree crowns and measuring tree height, canopy density, and canopy depth.